等距变换
等距变换 (Isometric Transformation) 保持欧氏距离不变。
等距变换就是对图像的旋转和平移。
- 变换矩阵
其中 $R$ 是单位旋转矩阵,$t$ 是平移向量,$\epsilon=\pm1$, 当$\epsilon=1$时保向,变换由旋转和平移组成,当$\epsilon=-1$时逆向,变换还包含一个镜像。
- 不变量:长度,角度,面积
- 自由度:3个自由度(1个旋转角+2个平移),至少需要2组点共4个方程求解。
相似变换
相似变换(Similarity Transformation)是在等距变换的基础上加上一个缩放。
等距变换就是对图像的旋转+平移+缩放。
- 变换矩阵
其中 $R$ 是单位旋转矩阵,$t$ 是平移向量, $s$ 是缩放因子。
- 不变量:角度,长度的比例,面积的比例,平行线关系
- 自由度:4个自由度(1个旋转角+2个平移+1个缩放尺度),至少需要2组点4个方程求解.
仿射变换
仿射变换(Affine Transformation)
仿射变换就是对图像的旋转+平移+缩放+切变(shear),相比前两种变换图像的形状发生了改变,但是原图中的平行线仍然保持平行。
- 变换矩阵
其中 $A$ 是仿射矩阵,$t$ 是平移向量。
仿射变换的 $A$ 矩阵可以做SVD分解,即
所以仿射变换 $A$ 可以看成先旋转 $\phi$,再沿着 $x, y$ 方向按照比例 $\lambda_1, \lambda_2$ 进行缩放,然后再旋转 $-\phi$,最后旋转 $\theta$。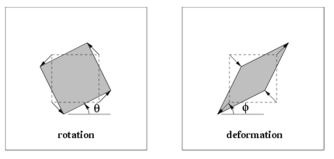
- 不变量:平行线关系,平行线长度的比例,面积的比例
- 自由度:6个自由度(2个旋转角+2个平移+2个缩放因子),至少需要3组点6个方程求解.
投影变换
投影变换(Projective Transformation)又叫2D homographies,是把点从一个平面映射到另一个平面,如世界坐标系下的平面到相机的成像平面。
投影变换就是对图像的旋转+平移+缩放+切变+射影,相比前三种变换图像的形变更为自由,原图中的平行线经过变换之后已经不在平行,而可能相交于一点,射影变换就是把理想点(平行直线在无穷远处相交)变换到图像上。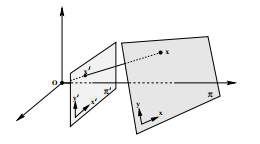
- 变换矩阵
其中 $A$ 是仿射矩阵,$t$ 是平移向量,$v=(v_1, v_2)^T$,$c$ 是一个常数。
- 不变量:长度的交比(比例的比例)
- 自由度:8个自由度(2个旋转角+2个平移+2个缩放因子+2个无穷远的线),至少需要4组点8个方程求解.
对于理想点 $(x_1,x_2,0)^T$ 的映射:
所以对于仿射变换,$v=0$,所有的理想点仍然被映射到理想点,对于投影变换,$v\neq 0$,一些理想点被映射到无穷远处。

